projects
Physical Embodiment in Embodied AI
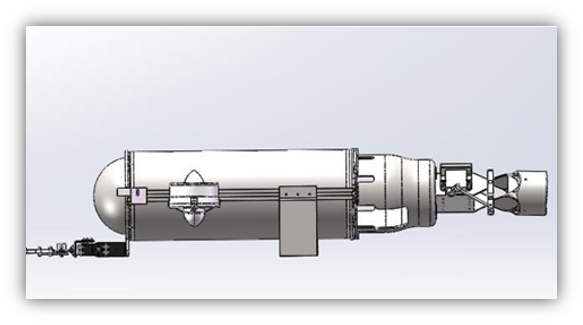
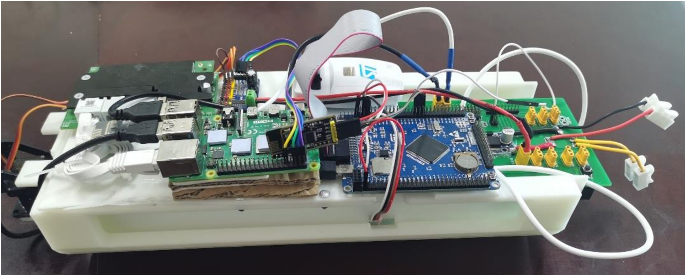
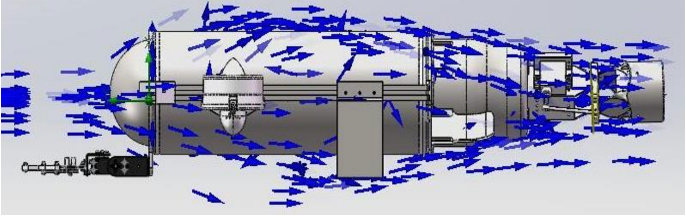
Physical Prototyping & Sim-to-Real Design: Led the end-to-end hardware-software co-design of a Remotely Operated Vehicle (ROV), achieving 100% 3D-printed fabrication and comprehensive hull structure simulation to effectively bridge the sim-to-real gap for embodied robotic systems.
Edge Perception: Deployed real-time YOLO object detection on NVIDIA Jetson Nano, enabling low-latency visual awareness for autonomous interaction.